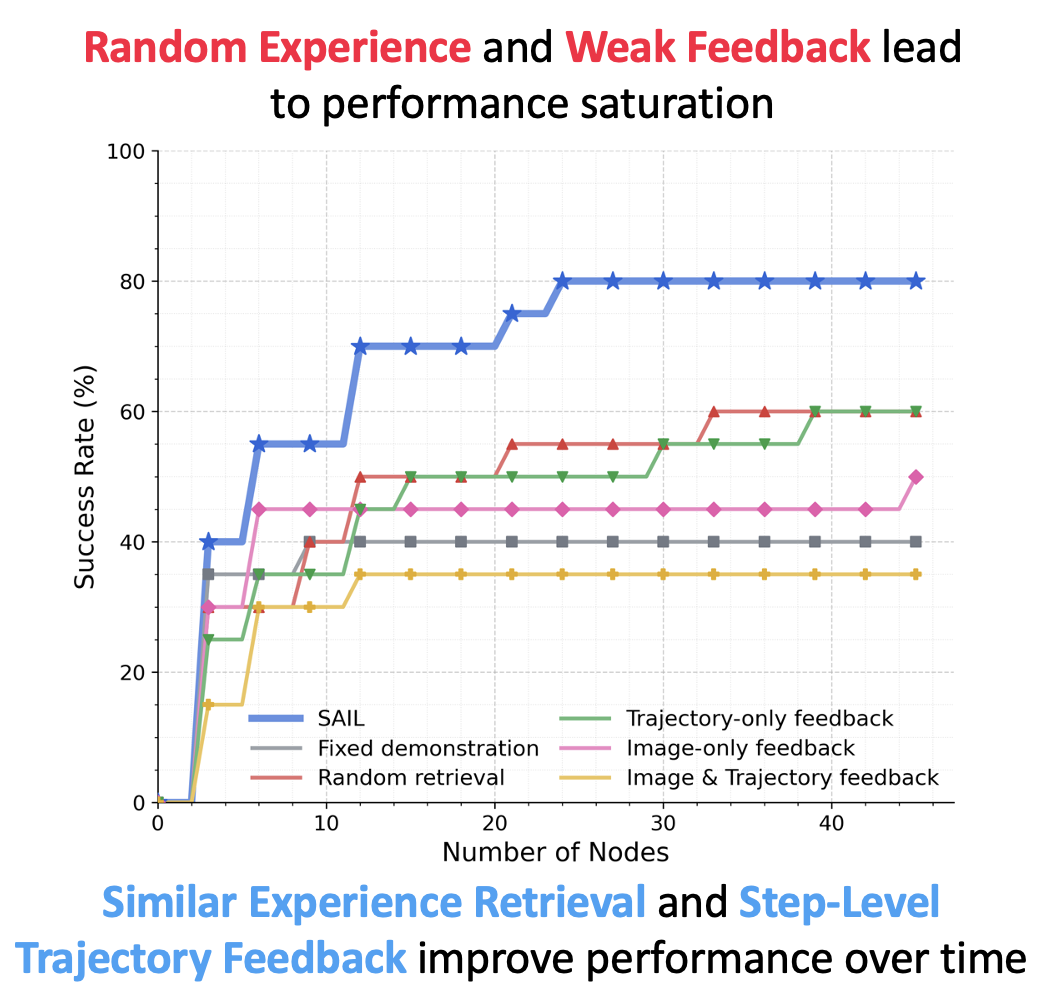
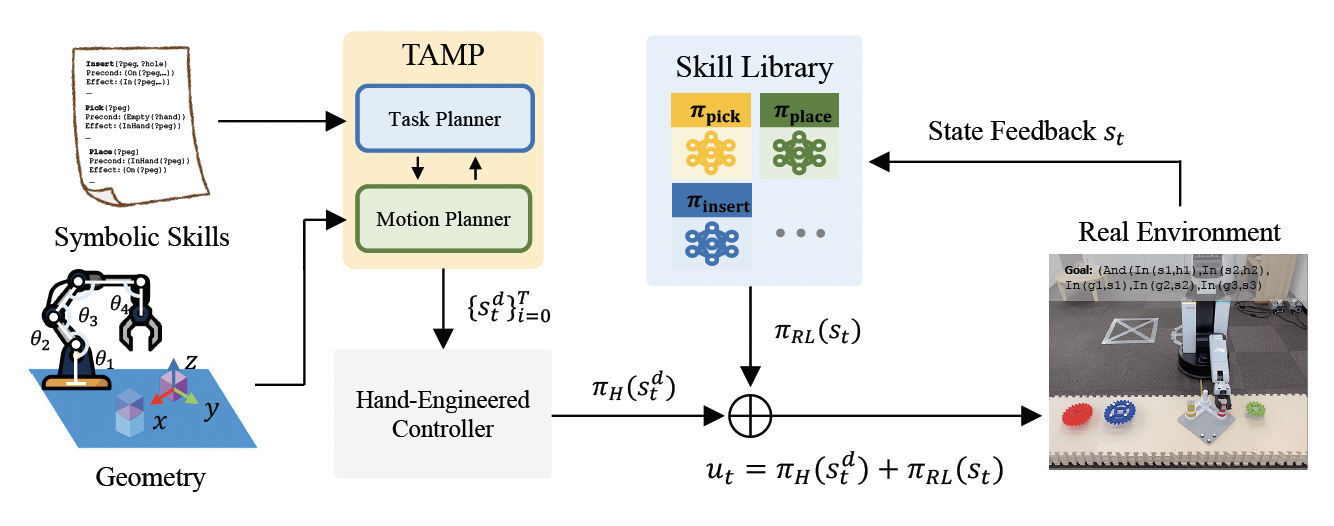
SAIL: Test-Time Scaling for In-Context Imitation Learning with VLM
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
accepted

Ph.D. Student · Matsuo-Iwasawa Lab, The University of Tokyo
I am a second-year Ph.D. student in the Department of Technology Management for Innovation, Graduate School of Engineering, The University of Tokyo. My research focuses on robot learning, with an emphasis on scalable imitation learning and test-time scaling for robot foundation models. Previously, I worked on task and motion planning for contact-rich manipulation at NAIST, and on multimodal object identification at Saitama University. I have also collaborated with Sakana AI, AIRoA, Matsuo Institute, and AIST.
Robot learningImitation learningTAMPWorld modelsFoundation modelsContact-rich manipulation
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026
accepted
SCI, 2024
JSAI, 2023
JSAI, 2023
JSAI, 2023
JSAI, 2022
Studying how uncertainty-aware vision-language models can generate exploratory subgoals for task and motion planning.
Building data generation pipelines for training autonomous robot foundation models using generative simulation.
Exploring scalable imitation learning for humanoid and dexterous manipulation in simulation-rich environments.
Investigating planning-driven robot manipulation for long-horizon tasks that require precise interaction and sequencing.
Training the Unitree A1 quadruped to walk by running PPO across thousands of parallel simulation environments for fast, scalable reinforcement learning of locomotion.
Undergraduate research on identifying objects from images and piezo-film (vibration) sensor signals, fusing the two modalities with a Siamese network for robust recognition.
Python · C++ · PyTorch · ROS · Docker · MuJoCo · Isaac Sim · Newton · PyBullet · SAPIEN · Gazebo · CARLA
makoto.sato@weblab.t.u-tokyo.ac.jp · github.com/makolon · Tokyo, Japan